|
I am an AI researcher working on generalization. I completed my PhD in EECS at MIT CSAIL, where I was part of the Embodied Intelligence Community of Research. I earned my MSc from the Faculty of Math & CS at the Weizmann Institute of Science, where I worked on Computer Vision, and before that, I received my BSc in Math & CS from the Hebrew University of Jerusalem. Email / Twitter / LinkedIn / Google Scholar |

|
|
I am interested in studying how to deploy agents in new environments with minimum to no supervision. My research focuses, in this context, on inferring how agents interact with the environment and with other agents in ways that are generalizable to new settings. Issues related to this research include combinatorial and out-of-distribution generalization, learning from demonstrations, human in the loop learning and object-centric learning. |
|
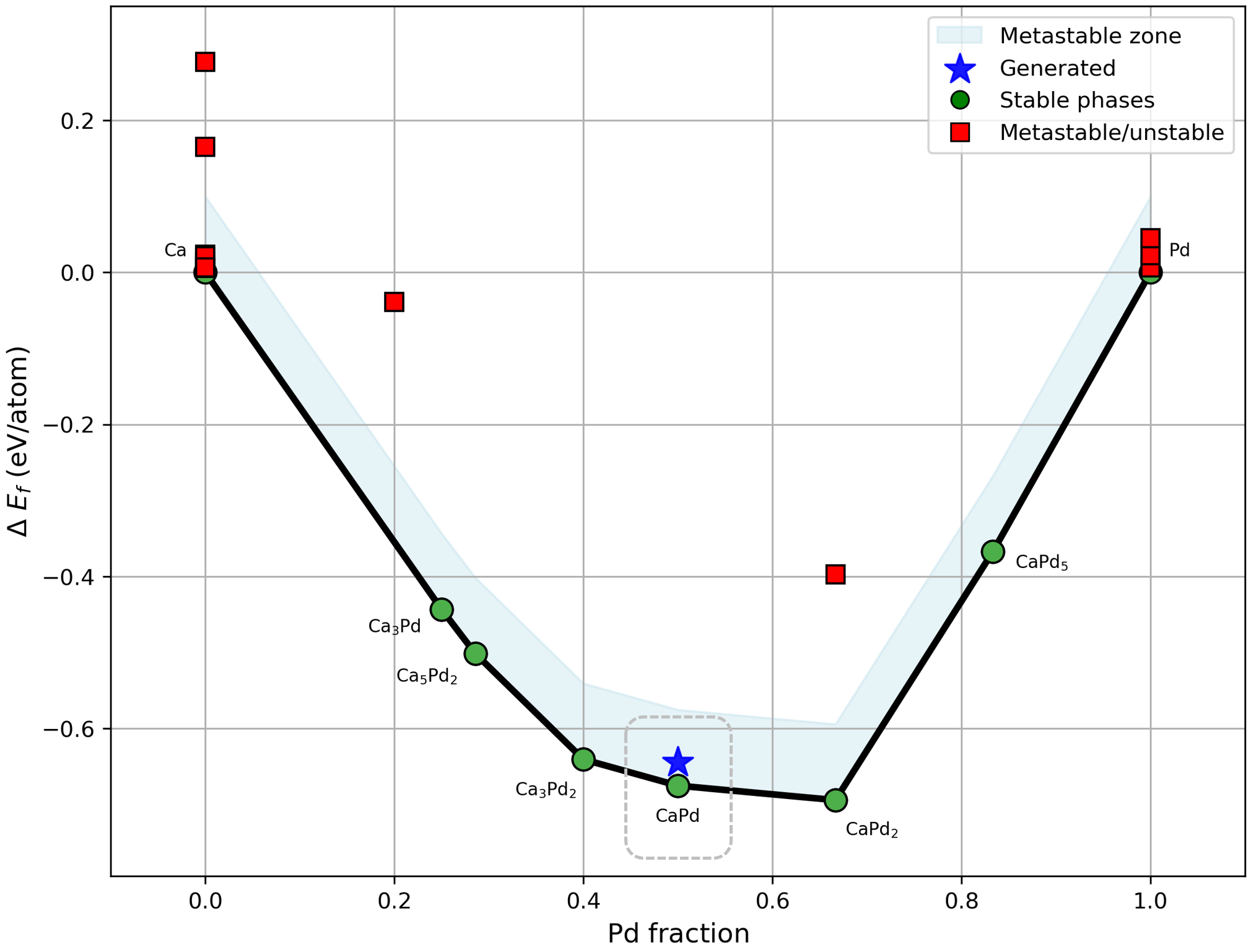
Zhang-Wei Hong*, Nofit Segal*, Aviv Netanyahu, Hoje Chun, Rafael Gómez-Bombarelli, Pulkit Agrawal NeurIPS Workshop on The Reach and Limits of AI for Scientific Discovery, 2025 Stable and diverse crystal structure generation via RL-tuned generative models. |
|
PhD thesis, Massachusetts Institute of Technology defense Methods for generalization under covariate shift, imbalanced data and domain shift. |
|
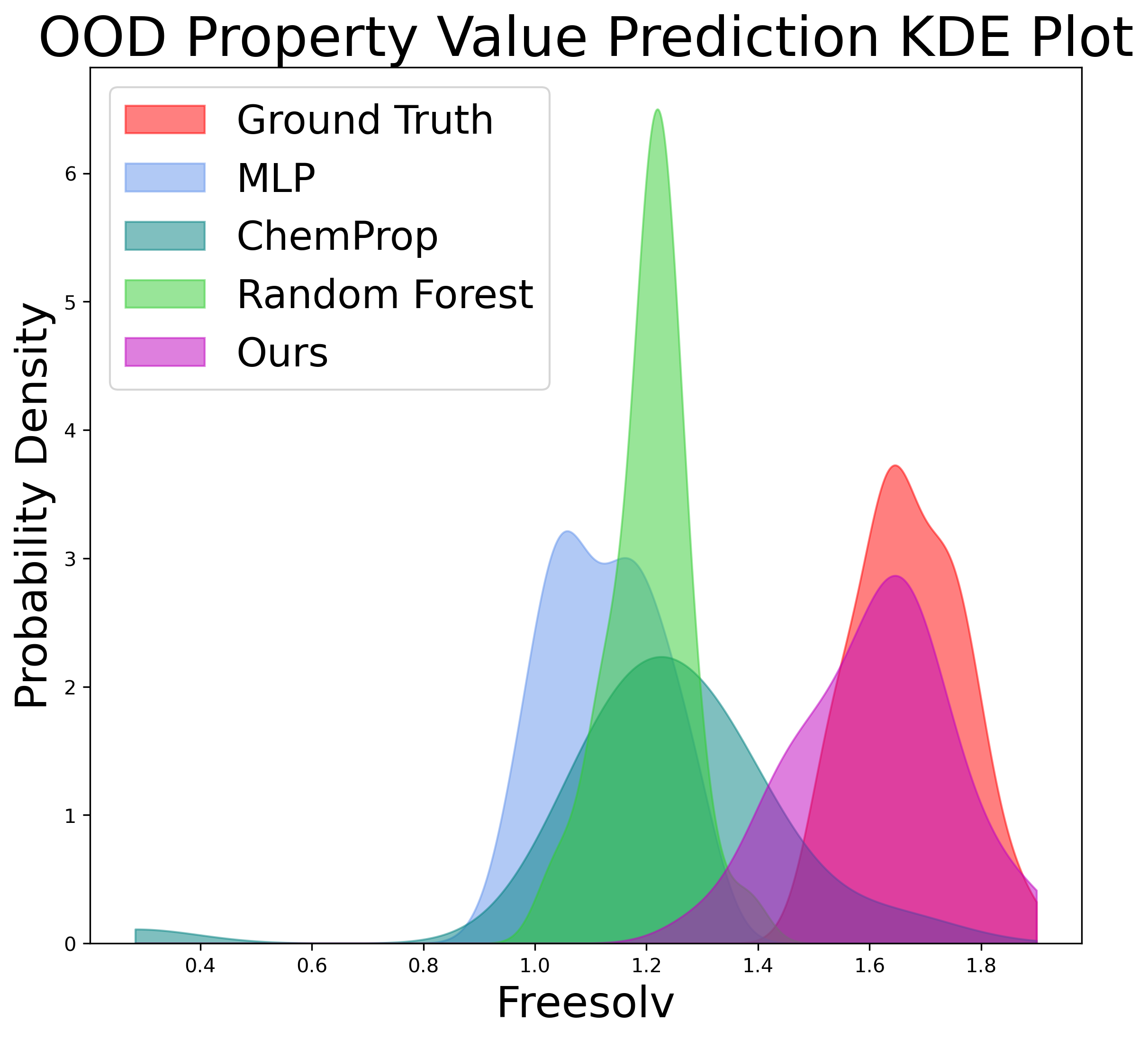
Nofit Segal*, Aviv Netanyahu*, Kevin Greenman, Pulkit Agrawal†, Rafael Gómez-Bombarelli† arXiv / code NPJ Computational Materials 2025 NeurIPS Workshop on AI for Accelerated Materials Design, 2024 (Oral Presentation) NeurIPS Workshop for Women in Machine Learning, 2024 Materials Research Society Fall Meeting, 2024 Molecular Machine Learning Conference, 2024 Extrapolating property prediction in materials science. |
|
Aviv Netanyahu, Yilun Du, Antonia Bronars, Jyothish Pari, Joshua B. Tenenbaum, Tianmin Shu, Pulkit Agrawal project page / arXiv / video / code NeurIPS 2024 RSS Workshop on Generative Modeling meets HRI, 2024 RSS Workshop on Task Specification for General-Purpose Intelligent Robots, 2024 Few-shot continual learning via generative modeling. |
|
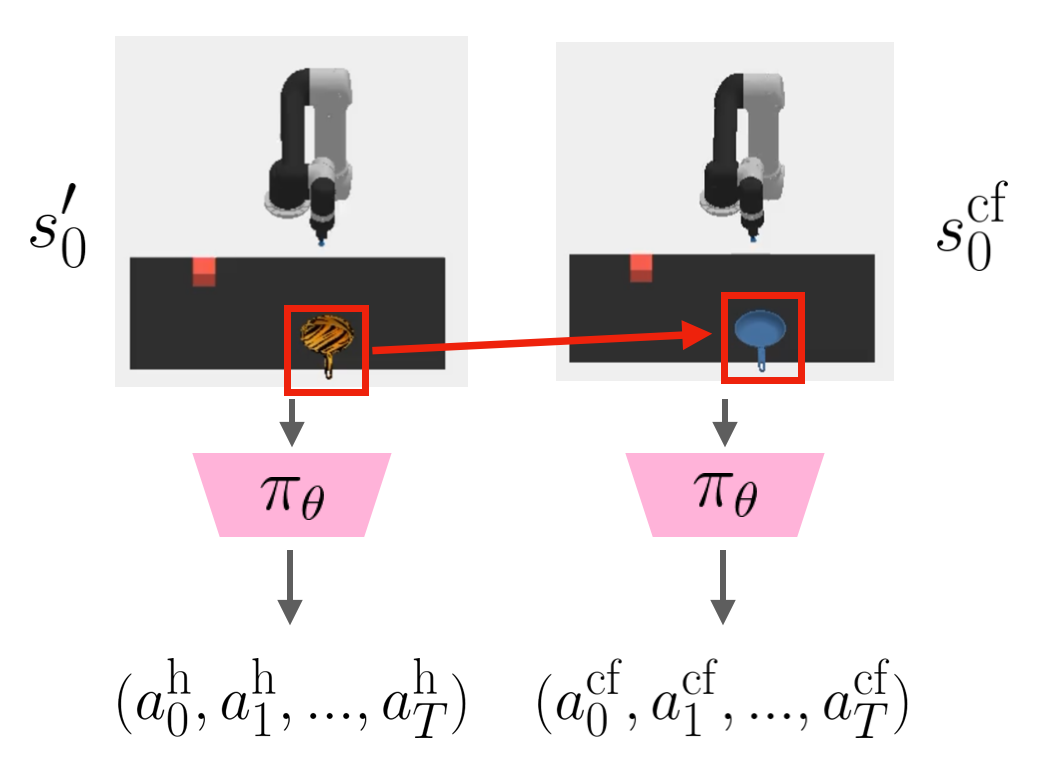
Andi Peng, Aviv Netanyahu, Mark Ho, Tianmin Shu, Andreea Bobu, Julie Shah, Pulkit Agrawal project page / arXiv / video / MIT News (front page story) ICML 2023 NeurIPS Workshop on Human in the Loop Learning, 2022 Counterfactual demonstrations for personalized policy adaptation. |
|
Aviv Netanyahu*, Abhishek Gupta*, Max Simchowitz, Kaiqing Zhang, Pulkit Agrawal arXiv / video / code / MIT CSAIL Alliances (Improbable AI Lab Tour) ICLR 2023 NeurIPS Workshop on Distribution Shifts, 2022 Out-of-support generalization via a transductive reparameterization. |
|
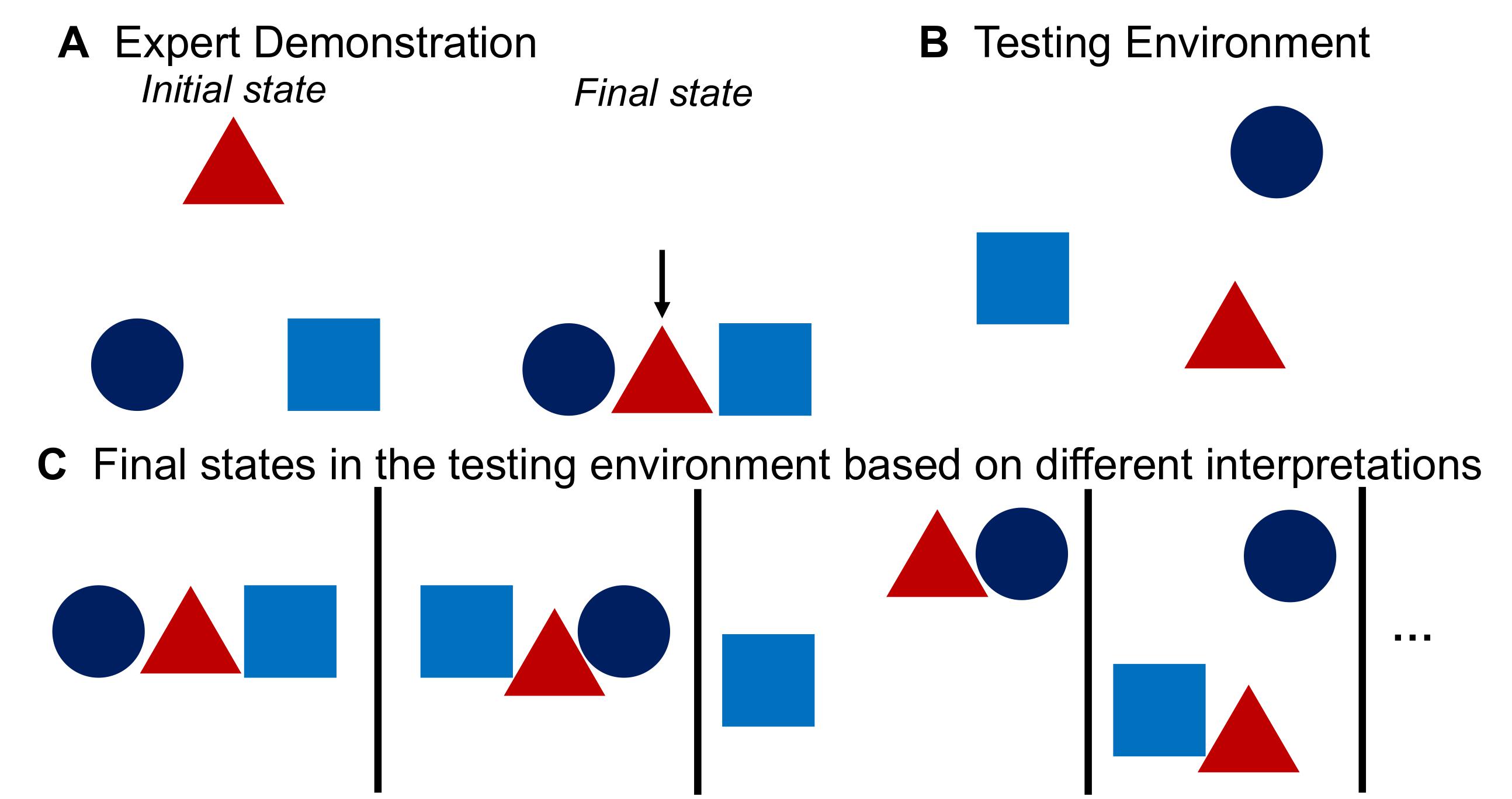
Aviv Netanyahu*, Tianmin Shu*, Joshua B. Tenenbaum, Pulkit Agrawal project page / arXiv / talk / code ICML 2022 RLDM 2022 ICLR Elements of Reasoning: Objects, Structure and Causality Workshop, 2022 Graph-based reward learning via active learning for object rearrangement. |
|
Aviv Netanyahu*, Tianmin Shu*, Boris Katz, Andrei Barbu, Joshua B. Tenenbaum project page / arXiv / talk / code AAAI 2021 NeurIPS Shared Visual Representations in Human & Machine Intelligence Workshop, 2020 (Oral Presentation, Best Paper Award) A benchmark for inferring physically grounded social interactions between agents. |
|
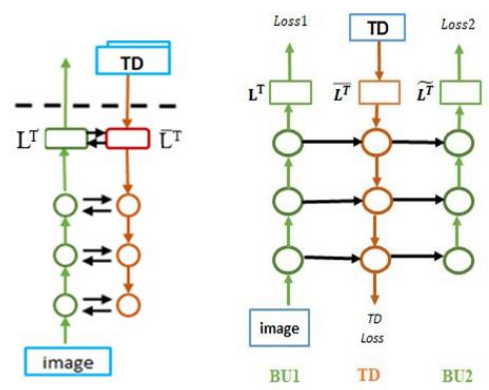
Shimon Ullman, Liav Assif*, Alona Strugatski*, Ben-Zion Vatashsky, Hila Levi, Aviv Netanyahu, Adam Yaari arXiv / code PNAS 2023 Scene graph extraction with bottom-up top-down networks. |
|
MSc thesis, Weizmann Institute of Science A system for selective visual relationship detection that achieves out-of-distribution and combinatorial generalization. |
|
|
|
TA, Machine Learning (6.867), MIT Fall 2021
Co-instructor, Deep Learning for Control (6.S090), MIT Winter 2021 Project Mentor, Computational Cognitive Science (9.66), MIT Fall 2020 Grader, Logic and Set Theory (69), Reichman University Spring 2017 Grader and Mathematics Help Center Instructor, Linear Algebra 2 (80135), Hebrew University of Jerusalem Spring 2016 |
|
|
|
Reviewer ICML 2024, NeurIPS 2023 (Top Reviewer) and workshops at RSS, ICRA and NeurIPS 2021-2023
Organizer Social Intelligence in Humans and Robots RSS 2024 Workshop, Computational Sensorimotor Learning Seminar, MIT 2021 Outreach Officer GW6 2020, Lecturer 'Rishonot BaMada' 2017-2019, Coding instructor 'Project Mehamemet' 2016-2019, Mentor for undergrad freshmen 'Shalom Shana Alef' 2014-2015 |
|
|